MicroMax's Solutions
MicroMax's Solutions
MicroMax's Solutions
new
 Microlog
Vehicle testing and tracking tool
The ODOS Microlog is perfectly suited for test vehicle tracking. Just plug it in and you are ready to monitor the vehicle. All is configured over the air! Perfect for any tracking and monitoring application for R&D use case as well as commercial use.
With the power of award-winning ODOS CloudSoft Professional Cloud software, you will take your test and measurement experience to another level over the air.
ODOS Microlog is a perfect tool for any vehicle testing department as you can carry out a large number of standard tests very simply with the quick installation and remote management with results being shown in real-time in ODOS Cloudsoft.
new
Microlog
Vehicle testing and tracking tool
The ODOS Microlog is perfectly suited for test vehicle tracking. Just plug it in and you are ready to monitor the vehicle. All is configured over the air! Perfect for any tracking and monitoring application for R&D use case as well as commercial use.
With the power of award-winning ODOS CloudSoft Professional Cloud software, you will take your test and measurement experience to another level over the air.
ODOS Microlog is a perfect tool for any vehicle testing department as you can carry out a large number of standard tests very simply with the quick installation and remote management with results being shown in real-time in ODOS Cloudsoft.
new
 CloudCommander
All-in-One CAN to Cloud datalogging solution
ODOSOLUTIONS AB (ODOS) and Kvaser AB have brought together a fresh perspective, unique collaboration, and advanced technology, in order to deliver next generation cloud connectivity and data logging for CAN (controller area network).
ODOS’ CloudCommander is a 4G-enabled data logger that integrates Kvaser’s well-known CAN interface hardware. ODOS’ Cloudsoft software platform, plus dashboard makes this a comprehensive CAN-to-Cloud data logging solution.
CloudCommander Features
The CloudCommander data logger combines the scale of Kvaser’s most popular CAN interface — the Kvaser Leaf Light — with the power of ODOS’ industry leading IoT Cloud Platform, to bring you a comprehensive CAN-to-Cloud datalogging solution:
Real-time CAN data streaming over 4G cellular connectivity to Cloud data storage
GPS tracking and 3-axis Accelerometer
Onboard UPS and memory buffer in the event of power and cellular connectivity outages
Native Kvaser Leaf (CANlib SDK) Interface and API
Rugged waterproof (IP67) field deployable enclosure with secure mounting location
CloudSoft Features
The tight vertical integration with award-winning CloudSoft platform and dashboard offers:
Remote real-time CAN data monitoring and analysis software
Over-The-Air (OTA) data-logger configuration updates
OTA Diagnostic Protocols on CAN (OBD2 & UDS)
Event based triggering to stream data, capture CAN traces and email alerts/reports
Virtual calculated CAN channels
Distributed team collaboration and data sharing platform
Plugins and REST API service
ASAM file formats
Certified to the most rigorous IT security and privacy (GDPR) legislation
What’s more, the CloudCommander incorporates a Kvaser USB-CAN interface to support your existing PC Applications whilst simultaneously streaming data to the cloud for remote fleet monitoring and diagnostics support.
CloudCommander
All-in-One CAN to Cloud datalogging solution
ODOSOLUTIONS AB (ODOS) and Kvaser AB have brought together a fresh perspective, unique collaboration, and advanced technology, in order to deliver next generation cloud connectivity and data logging for CAN (controller area network).
ODOS’ CloudCommander is a 4G-enabled data logger that integrates Kvaser’s well-known CAN interface hardware. ODOS’ Cloudsoft software platform, plus dashboard makes this a comprehensive CAN-to-Cloud data logging solution.
CloudCommander Features
The CloudCommander data logger combines the scale of Kvaser’s most popular CAN interface — the Kvaser Leaf Light — with the power of ODOS’ industry leading IoT Cloud Platform, to bring you a comprehensive CAN-to-Cloud datalogging solution:
Real-time CAN data streaming over 4G cellular connectivity to Cloud data storage
GPS tracking and 3-axis Accelerometer
Onboard UPS and memory buffer in the event of power and cellular connectivity outages
Native Kvaser Leaf (CANlib SDK) Interface and API
Rugged waterproof (IP67) field deployable enclosure with secure mounting location
CloudSoft Features
The tight vertical integration with award-winning CloudSoft platform and dashboard offers:
Remote real-time CAN data monitoring and analysis software
Over-The-Air (OTA) data-logger configuration updates
OTA Diagnostic Protocols on CAN (OBD2 & UDS)
Event based triggering to stream data, capture CAN traces and email alerts/reports
Virtual calculated CAN channels
Distributed team collaboration and data sharing platform
Plugins and REST API service
ASAM file formats
Certified to the most rigorous IT security and privacy (GDPR) legislation
What’s more, the CloudCommander incorporates a Kvaser USB-CAN interface to support your existing PC Applications whilst simultaneously streaming data to the cloud for remote fleet monitoring and diagnostics support.
Microlog
Vehicle testing and tracking tool
The ODOS Microlog is perfectly suited for test vehicle tracking. Just plug it in and you are ready to monitor the vehicle. All is configured over the air! Perfect for any tracking and monitoring application for R&D use case as well as commercial use.
With the power of award-winning ODOS CloudSoft Professional Cloud software, you will take your test and measurement experience to another level over the air.
ODOS Microlog is a perfect tool for any vehicle testing department as you can carry out a large number of standard tests very simply with the quick installation and remote management with results being shown in real-time in ODOS Cloudsoft.
new
CloudCommander
All-in-One CAN to Cloud datalogging solution
ODOSOLUTIONS AB (ODOS) and Kvaser AB have brought together a fresh perspective, unique collaboration, and advanced technology, in order to deliver next generation cloud connectivity and data logging for CAN (controller area network).
ODOS’ CloudCommander is a 4G-enabled data logger that integrates Kvaser’s well-known CAN interface hardware. ODOS’ Cloudsoft software platform, plus dashboard makes this a comprehensive CAN-to-Cloud data logging solution.
CloudCommander Features
The CloudCommander data logger combines the scale of Kvaser’s most popular CAN interface — the Kvaser Leaf Light — with the power of ODOS’ industry leading IoT Cloud Platform, to bring you a comprehensive CAN-to-Cloud datalogging solution:
Real-time CAN data streaming over 4G cellular connectivity to Cloud data storage
GPS tracking and 3-axis Accelerometer
Onboard UPS and memory buffer in the event of power and cellular connectivity outages
Native Kvaser Leaf (CANlib SDK) Interface and API
Rugged waterproof (IP67) field deployable enclosure with secure mounting location
CloudSoft Features
The tight vertical integration with award-winning CloudSoft platform and dashboard offers:
Remote real-time CAN data monitoring and analysis software
Over-The-Air (OTA) data-logger configuration updates
OTA Diagnostic Protocols on CAN (OBD2 & UDS)
Event based triggering to stream data, capture CAN traces and email alerts/reports
Virtual calculated CAN channels
Distributed team collaboration and data sharing platform
Plugins and REST API service
ASAM file formats
Certified to the most rigorous IT security and privacy (GDPR) legislation
What’s more, the CloudCommander incorporates a Kvaser USB-CAN interface to support your existing PC Applications whilst simultaneously streaming data to the cloud for remote fleet monitoring and diagnostics support.
new
 X-Analyser
Windows based tool to test your CAN, CAN FD, CANopen, J1939, NMEA2000, DeviceNet and LIN bus systems
X-Analyser Features
X-Analyser supports all of the typical features of a CAN, CAN FD, LIN analysis tool plus the following:
Simulate CAN, CAN FD & LIN Devices or Network — Message Builder for Transmission
You can build messages for transmission on a CAN, CAN FD or LIN bus from an .DBC or .LDF file. This saves time in converting decimal to hexadecimal and calculating scaling & offset. All you need to do is enter the signal physical value e.g. Engine Speed as 3000 rpm or Oil Temperature as degrees C.
CANopen
X-Analyser has support for the CANopen higher layer protocol which is used for industrial automation and other off-highway applications. There are two main areas of support for which you must have the X-Analyser Professional Edition; message/signal interpretation and transmission of Network Management messages to put individual nodes or the whole bus into different states.
NMEA 2000
The most powerful NMEA2000 test tool on the market. The NMEA2000 PGN signal database is embedded into X-Analyser which means that you can send or receive and interpret the data easily. The Fast Packet Protocol is supported for sending and receiving of NMEA2000 packets. CAN identifiers are interpreted as PGN, Source Address, Priority etc. and the data field is broken down into PGN fields and signals.
CAN Oscilloscope
X-Analyser captures CAN_H & CAN_L signals for each CAN frame on CAN bus
Can be used to carry out full CAN system audits
Help identify which ECUs or areas of CAN bus is experiencing electrical problems
Filter Editor
Use the filter editor to filter CAN frames on the Raw Data Trace they can be filtered by; Channel, Data, Data Length, Direction, Frame ID, Frame Type and Timestamp. These can be used with a combination of logic functions to define certain criteria for Filtering.
Gauges
With a CAN database loaded signals can be configured to show as gauges. With a combination of gauge styles available and gauge values can be defined such as; Min and Max values and Minor and Major Step Intervals.
Interactive Generator for CAN and J1939
The Interactive Generator (IG) allows the user to use a CANdb (*.dbc) file to interactively transmit CAN messages onto a system using the signals physical values that will automatically be converted to raw CAN data. Running in parallel with X-Analyser, the IG allows the user to create and change CAN messages on the fly. Transmission of a message can be carried out by user interaction (i.e. by clicking on a button) or by a timer with resolution 5ms which allows periodic transmitting.
ISO 15765 transmitter
Easily create a Mode 3 transmitter when the ISO 15765 Higher Layer Protocol has been added.
J1939 Signals Database
X-analyser Professional Edition comes with a J1939 database where signals can be selected and source address defined so they can be displayed in a Signals Panel, Gauge or Scope.
J1939 Signals
Within the J1939 Raw Trace tab available with X-analyser Professional CAN frames can be expanded to show the signals within that frame.
Object Transmitter
The Object Transmitter can be used to create CAN frames and transmit them onto a network. Standard and Extended ID’s can be selected, also Transmitters can be sent periodically by selecting Auto-Repeat and defining the time interval in milliseconds.
Graphing on Signals Scope
With a CAN, CAN FD or LIN database loaded, signals can be selected for the scope to displayed and plotted. Points on the scope can be selected to show the value at a certain time. The scope can also be exported to CSV format to be opened and worked with in Excel.
Signals Editor
The signals editor can be used to create parts of a CAN database on the fly, what’s created can be configure to a signals panel, gauges or scope.
Signals Panel
With a CAN database loaded signals can be configured to the signals panel to show physical values. The signals can be displayed numerically or symbolically.
Signals Search Function
CAN databases when loaded can be searched using the signals search function. Quotation marks can also be used to search for a whole name i.e. «Engine RPM».
Symbolic and Numeric Values
X-analyser can now have the same signals displayed more than once on a signals panel, gauge or scope. Within a signals panel the same signal can be displayed more than once with each as a symbolic or numeric value.
UDS DTC reader
X-analyser now has a UDS DTC reader, once configured in the transport protocol for the UDS DTC reader. It shall read and clear UDS DTC’s with the option to set the DTC Status Mask so different ECU’s can be read.
LIN Schedule Tables
When you load a LDF into X-Analyser, you can load the Schedule Table into the Object Transmitter to simulate all or some of the nodes on the LIN bus.
Supports industry standard log files and databases
X-Analyser uses industry standard files so that they can be easily shared between your engineers, customers and supplier. For description of Controller Area Networks (CAN), X-Analyser supports the CAN database file format (*.dbc). For description of Local Interconnect Networks (LIN), X-Analyser supports the LIN Description File (LDF) format (*.ldf). For logs of CAN data, X-Analyser supports log files in the ASCII file format (*.asc).
Virtual networks and channels for off-line analysis
A number of virtual buses are available with X-Analyser which are useful for off-line demonstration or working away with data captured from the CAN or LIN bus so that the data can be reviewed and played back on the PC without the need for a network interface. Virtual buses include:
Native virtual X-Analyser virtual buses that are connected in a simulated loop-back. This is ideal for play-back purposes.
Random CAN generator which generates a CAN message of ID 0×500 with a data field that contains a sine wave and a number of random signal waveforms.
Random LIN generator which generates a LIN message of ID 0×32 with a data field that contains a sine wave and a number of random signal waveforms.
Random CAN-FD generator which generates a CAN message of ID 0×500, DLC 48 with a data field that contains a sine wave and a number of random signal waveforms.
In addition to this if you are using a Kvaser or Vector interface then you can use the virtual channels that are provided by these manufacturers.
Easy Project Sharing
X-Analyser’s project files means that you can put together different setups and GUI displays for different projects, vehicles and networks.
Embedding of CAN or LIN databases into the X-Analyser projects mean easy sharing of project files without having to worry about the database linking or location.
X-Analyser
Windows based tool to test your CAN, CAN FD, CANopen, J1939, NMEA2000, DeviceNet and LIN bus systems
X-Analyser Features
X-Analyser supports all of the typical features of a CAN, CAN FD, LIN analysis tool plus the following:
Simulate CAN, CAN FD & LIN Devices or Network — Message Builder for Transmission
You can build messages for transmission on a CAN, CAN FD or LIN bus from an .DBC or .LDF file. This saves time in converting decimal to hexadecimal and calculating scaling & offset. All you need to do is enter the signal physical value e.g. Engine Speed as 3000 rpm or Oil Temperature as degrees C.
CANopen
X-Analyser has support for the CANopen higher layer protocol which is used for industrial automation and other off-highway applications. There are two main areas of support for which you must have the X-Analyser Professional Edition; message/signal interpretation and transmission of Network Management messages to put individual nodes or the whole bus into different states.
NMEA 2000
The most powerful NMEA2000 test tool on the market. The NMEA2000 PGN signal database is embedded into X-Analyser which means that you can send or receive and interpret the data easily. The Fast Packet Protocol is supported for sending and receiving of NMEA2000 packets. CAN identifiers are interpreted as PGN, Source Address, Priority etc. and the data field is broken down into PGN fields and signals.
CAN Oscilloscope
X-Analyser captures CAN_H & CAN_L signals for each CAN frame on CAN bus
Can be used to carry out full CAN system audits
Help identify which ECUs or areas of CAN bus is experiencing electrical problems
Filter Editor
Use the filter editor to filter CAN frames on the Raw Data Trace they can be filtered by; Channel, Data, Data Length, Direction, Frame ID, Frame Type and Timestamp. These can be used with a combination of logic functions to define certain criteria for Filtering.
Gauges
With a CAN database loaded signals can be configured to show as gauges. With a combination of gauge styles available and gauge values can be defined such as; Min and Max values and Minor and Major Step Intervals.
Interactive Generator for CAN and J1939
The Interactive Generator (IG) allows the user to use a CANdb (*.dbc) file to interactively transmit CAN messages onto a system using the signals physical values that will automatically be converted to raw CAN data. Running in parallel with X-Analyser, the IG allows the user to create and change CAN messages on the fly. Transmission of a message can be carried out by user interaction (i.e. by clicking on a button) or by a timer with resolution 5ms which allows periodic transmitting.
ISO 15765 transmitter
Easily create a Mode 3 transmitter when the ISO 15765 Higher Layer Protocol has been added.
J1939 Signals Database
X-analyser Professional Edition comes with a J1939 database where signals can be selected and source address defined so they can be displayed in a Signals Panel, Gauge or Scope.
J1939 Signals
Within the J1939 Raw Trace tab available with X-analyser Professional CAN frames can be expanded to show the signals within that frame.
Object Transmitter
The Object Transmitter can be used to create CAN frames and transmit them onto a network. Standard and Extended ID’s can be selected, also Transmitters can be sent periodically by selecting Auto-Repeat and defining the time interval in milliseconds.
Graphing on Signals Scope
With a CAN, CAN FD or LIN database loaded, signals can be selected for the scope to displayed and plotted. Points on the scope can be selected to show the value at a certain time. The scope can also be exported to CSV format to be opened and worked with in Excel.
Signals Editor
The signals editor can be used to create parts of a CAN database on the fly, what’s created can be configure to a signals panel, gauges or scope.
Signals Panel
With a CAN database loaded signals can be configured to the signals panel to show physical values. The signals can be displayed numerically or symbolically.
Signals Search Function
CAN databases when loaded can be searched using the signals search function. Quotation marks can also be used to search for a whole name i.e. «Engine RPM».
Symbolic and Numeric Values
X-analyser can now have the same signals displayed more than once on a signals panel, gauge or scope. Within a signals panel the same signal can be displayed more than once with each as a symbolic or numeric value.
UDS DTC reader
X-analyser now has a UDS DTC reader, once configured in the transport protocol for the UDS DTC reader. It shall read and clear UDS DTC’s with the option to set the DTC Status Mask so different ECU’s can be read.
LIN Schedule Tables
When you load a LDF into X-Analyser, you can load the Schedule Table into the Object Transmitter to simulate all or some of the nodes on the LIN bus.
Supports industry standard log files and databases
X-Analyser uses industry standard files so that they can be easily shared between your engineers, customers and supplier. For description of Controller Area Networks (CAN), X-Analyser supports the CAN database file format (*.dbc). For description of Local Interconnect Networks (LIN), X-Analyser supports the LIN Description File (LDF) format (*.ldf). For logs of CAN data, X-Analyser supports log files in the ASCII file format (*.asc).
Virtual networks and channels for off-line analysis
A number of virtual buses are available with X-Analyser which are useful for off-line demonstration or working away with data captured from the CAN or LIN bus so that the data can be reviewed and played back on the PC without the need for a network interface. Virtual buses include:
Native virtual X-Analyser virtual buses that are connected in a simulated loop-back. This is ideal for play-back purposes.
Random CAN generator which generates a CAN message of ID 0×500 with a data field that contains a sine wave and a number of random signal waveforms.
Random LIN generator which generates a LIN message of ID 0×32 with a data field that contains a sine wave and a number of random signal waveforms.
Random CAN-FD generator which generates a CAN message of ID 0×500, DLC 48 with a data field that contains a sine wave and a number of random signal waveforms.
In addition to this if you are using a Kvaser or Vector interface then you can use the virtual channels that are provided by these manufacturers.
Easy Project Sharing
X-Analyser’s project files means that you can put together different setups and GUI displays for different projects, vehicles and networks.
Embedding of CAN or LIN databases into the X-Analyser projects mean easy sharing of project files without having to worry about the database linking or location.
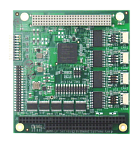 JANUS-MM-4LP-XT
PC/104-Plus Quad Isolated CAN Module with 24 Digital I/O
High Performance CAN Functionality
The Janus-MM-4LP-XT I/O module offers two or four CANbus 2.0B ports with opto-isolation plus 24 digital I/O lines. Models are available in both the PC/104-Plus and PC/104 form factors. An FGPA core houses the CAN controller logic and provides data rates up to 1Mbps. Each port supports standard and extended frames as well as expanded TX and RX message queues for enhanced performance. Each port has its own combination isolator and transceiver chip. The Janus-MM-4LP-XT fits a wide variety of rugged and on-vehicle embedded serial I/O application needs.
Digital I/O
Janus-MM-4LP-XT offers 24 programmable digital I/O lines organized as three 8-bit digital I/O ports.
Rugged Design
Janus-MM-4LP-XT was designed with harsh applications in mind including latching connectors to further improve reliability. Extended temperature operation of −40°C to +85°C is tested and guaranteed. The module is compatible with MIL-STD-202G shock and vibration specifications.
Key Features
All four CAN ports on the Janus-MM-4LP-XT are driven from an FPGA-based CAN 2.0 bus controller core which provides full CAN2.0B functionality. Each port has an Analog Devices combination isolation and transceiver chip, independently isolating it from the host system and other ports to eliminate sensitivity to noise and ground shifts in the network.
The product has several jumper configurable options including CAN termination and bias. The digital I/O logic level and pull-up / pull-down resistors are also jumper configurable.
For additional ruggedization, zero ohm jumper-bypass resistors can be installed in any configuration.
Software Support
Janus-MM-4LP-XT comes with a basic CAN driver for Windows 7, XP and Linux 2.6. The driver supports dual-independent and dual-redundant modes.
JANUS-MM-4LP-XT
PC/104-Plus Quad Isolated CAN Module with 24 Digital I/O
High Performance CAN Functionality
The Janus-MM-4LP-XT I/O module offers two or four CANbus 2.0B ports with opto-isolation plus 24 digital I/O lines. Models are available in both the PC/104-Plus and PC/104 form factors. An FGPA core houses the CAN controller logic and provides data rates up to 1Mbps. Each port supports standard and extended frames as well as expanded TX and RX message queues for enhanced performance. Each port has its own combination isolator and transceiver chip. The Janus-MM-4LP-XT fits a wide variety of rugged and on-vehicle embedded serial I/O application needs.
Digital I/O
Janus-MM-4LP-XT offers 24 programmable digital I/O lines organized as three 8-bit digital I/O ports.
Rugged Design
Janus-MM-4LP-XT was designed with harsh applications in mind including latching connectors to further improve reliability. Extended temperature operation of −40°C to +85°C is tested and guaranteed. The module is compatible with MIL-STD-202G shock and vibration specifications.
Key Features
All four CAN ports on the Janus-MM-4LP-XT are driven from an FPGA-based CAN 2.0 bus controller core which provides full CAN2.0B functionality. Each port has an Analog Devices combination isolation and transceiver chip, independently isolating it from the host system and other ports to eliminate sensitivity to noise and ground shifts in the network.
The product has several jumper configurable options including CAN termination and bias. The digital I/O logic level and pull-up / pull-down resistors are also jumper configurable.
For additional ruggedization, zero ohm jumper-bypass resistors can be installed in any configuration.
Software Support
Janus-MM-4LP-XT comes with a basic CAN driver for Windows 7, XP and Linux 2.6. The driver supports dual-independent and dual-redundant modes.
X-Analyser
Windows based tool to test your CAN, CAN FD, CANopen, J1939, NMEA2000, DeviceNet and LIN bus systems
X-Analyser Features
X-Analyser supports all of the typical features of a CAN, CAN FD, LIN analysis tool plus the following:
Simulate CAN, CAN FD & LIN Devices or Network — Message Builder for Transmission
You can build messages for transmission on a CAN, CAN FD or LIN bus from an .DBC or .LDF file. This saves time in converting decimal to hexadecimal and calculating scaling & offset. All you need to do is enter the signal physical value e.g. Engine Speed as 3000 rpm or Oil Temperature as degrees C.
CANopen
X-Analyser has support for the CANopen higher layer protocol which is used for industrial automation and other off-highway applications. There are two main areas of support for which you must have the X-Analyser Professional Edition; message/signal interpretation and transmission of Network Management messages to put individual nodes or the whole bus into different states.
NMEA 2000
The most powerful NMEA2000 test tool on the market. The NMEA2000 PGN signal database is embedded into X-Analyser which means that you can send or receive and interpret the data easily. The Fast Packet Protocol is supported for sending and receiving of NMEA2000 packets. CAN identifiers are interpreted as PGN, Source Address, Priority etc. and the data field is broken down into PGN fields and signals.
CAN Oscilloscope
X-Analyser captures CAN_H & CAN_L signals for each CAN frame on CAN bus
Can be used to carry out full CAN system audits
Help identify which ECUs or areas of CAN bus is experiencing electrical problems
Filter Editor
Use the filter editor to filter CAN frames on the Raw Data Trace they can be filtered by; Channel, Data, Data Length, Direction, Frame ID, Frame Type and Timestamp. These can be used with a combination of logic functions to define certain criteria for Filtering.
Gauges
With a CAN database loaded signals can be configured to show as gauges. With a combination of gauge styles available and gauge values can be defined such as; Min and Max values and Minor and Major Step Intervals.
Interactive Generator for CAN and J1939
The Interactive Generator (IG) allows the user to use a CANdb (*.dbc) file to interactively transmit CAN messages onto a system using the signals physical values that will automatically be converted to raw CAN data. Running in parallel with X-Analyser, the IG allows the user to create and change CAN messages on the fly. Transmission of a message can be carried out by user interaction (i.e. by clicking on a button) or by a timer with resolution 5ms which allows periodic transmitting.
ISO 15765 transmitter
Easily create a Mode 3 transmitter when the ISO 15765 Higher Layer Protocol has been added.
J1939 Signals Database
X-analyser Professional Edition comes with a J1939 database where signals can be selected and source address defined so they can be displayed in a Signals Panel, Gauge or Scope.
J1939 Signals
Within the J1939 Raw Trace tab available with X-analyser Professional CAN frames can be expanded to show the signals within that frame.
Object Transmitter
The Object Transmitter can be used to create CAN frames and transmit them onto a network. Standard and Extended ID’s can be selected, also Transmitters can be sent periodically by selecting Auto-Repeat and defining the time interval in milliseconds.
Graphing on Signals Scope
With a CAN, CAN FD or LIN database loaded, signals can be selected for the scope to displayed and plotted. Points on the scope can be selected to show the value at a certain time. The scope can also be exported to CSV format to be opened and worked with in Excel.
Signals Editor
The signals editor can be used to create parts of a CAN database on the fly, what’s created can be configure to a signals panel, gauges or scope.
Signals Panel
With a CAN database loaded signals can be configured to the signals panel to show physical values. The signals can be displayed numerically or symbolically.
Signals Search Function
CAN databases when loaded can be searched using the signals search function. Quotation marks can also be used to search for a whole name i.e. «Engine RPM».
Symbolic and Numeric Values
X-analyser can now have the same signals displayed more than once on a signals panel, gauge or scope. Within a signals panel the same signal can be displayed more than once with each as a symbolic or numeric value.
UDS DTC reader
X-analyser now has a UDS DTC reader, once configured in the transport protocol for the UDS DTC reader. It shall read and clear UDS DTC’s with the option to set the DTC Status Mask so different ECU’s can be read.
LIN Schedule Tables
When you load a LDF into X-Analyser, you can load the Schedule Table into the Object Transmitter to simulate all or some of the nodes on the LIN bus.
Supports industry standard log files and databases
X-Analyser uses industry standard files so that they can be easily shared between your engineers, customers and supplier. For description of Controller Area Networks (CAN), X-Analyser supports the CAN database file format (*.dbc). For description of Local Interconnect Networks (LIN), X-Analyser supports the LIN Description File (LDF) format (*.ldf). For logs of CAN data, X-Analyser supports log files in the ASCII file format (*.asc).
Virtual networks and channels for off-line analysis
A number of virtual buses are available with X-Analyser which are useful for off-line demonstration or working away with data captured from the CAN or LIN bus so that the data can be reviewed and played back on the PC without the need for a network interface. Virtual buses include:
Native virtual X-Analyser virtual buses that are connected in a simulated loop-back. This is ideal for play-back purposes.
Random CAN generator which generates a CAN message of ID 0×500 with a data field that contains a sine wave and a number of random signal waveforms.
Random LIN generator which generates a LIN message of ID 0×32 with a data field that contains a sine wave and a number of random signal waveforms.
Random CAN-FD generator which generates a CAN message of ID 0×500, DLC 48 with a data field that contains a sine wave and a number of random signal waveforms.
In addition to this if you are using a Kvaser or Vector interface then you can use the virtual channels that are provided by these manufacturers.
Easy Project Sharing
X-Analyser’s project files means that you can put together different setups and GUI displays for different projects, vehicles and networks.
Embedding of CAN or LIN databases into the X-Analyser projects mean easy sharing of project files without having to worry about the database linking or location.
JANUS-MM-4LP-XT
PC/104-Plus Quad Isolated CAN Module with 24 Digital I/O
High Performance CAN Functionality
The Janus-MM-4LP-XT I/O module offers two or four CANbus 2.0B ports with opto-isolation plus 24 digital I/O lines. Models are available in both the PC/104-Plus and PC/104 form factors. An FGPA core houses the CAN controller logic and provides data rates up to 1Mbps. Each port supports standard and extended frames as well as expanded TX and RX message queues for enhanced performance. Each port has its own combination isolator and transceiver chip. The Janus-MM-4LP-XT fits a wide variety of rugged and on-vehicle embedded serial I/O application needs.
Digital I/O
Janus-MM-4LP-XT offers 24 programmable digital I/O lines organized as three 8-bit digital I/O ports.
Rugged Design
Janus-MM-4LP-XT was designed with harsh applications in mind including latching connectors to further improve reliability. Extended temperature operation of −40°C to +85°C is tested and guaranteed. The module is compatible with MIL-STD-202G shock and vibration specifications.
Key Features
All four CAN ports on the Janus-MM-4LP-XT are driven from an FPGA-based CAN 2.0 bus controller core which provides full CAN2.0B functionality. Each port has an Analog Devices combination isolation and transceiver chip, independently isolating it from the host system and other ports to eliminate sensitivity to noise and ground shifts in the network.
The product has several jumper configurable options including CAN termination and bias. The digital I/O logic level and pull-up / pull-down resistors are also jumper configurable.
For additional ruggedization, zero ohm jumper-bypass resistors can be installed in any configuration.
Software Support
Janus-MM-4LP-XT comes with a basic CAN driver for Windows 7, XP and Linux 2.6. The driver supports dual-independent and dual-redundant modes.
 U100P-X3
Single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation
The Kvaser U100P-X3 is a robust, single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation (Tested according EN 60335) that squarely addresses the needs of the evolving automotive development market.
Fully compatible with J1939, CANopen, NMEA 2000® and DeviceNet, this is the first in a new range of interfaces that is also suited to rugged applications in marine, industrial, heavy duty vehicle and heavy industries.
The Kvaser U100P is also available with 9-pin D-SUB, J1939 or M12 CAN connectors.
U100P-X3
Single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation
The Kvaser U100P-X3 is a robust, single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation (Tested according EN 60335) that squarely addresses the needs of the evolving automotive development market.
Fully compatible with J1939, CANopen, NMEA 2000® and DeviceNet, this is the first in a new range of interfaces that is also suited to rugged applications in marine, industrial, heavy duty vehicle and heavy industries.
The Kvaser U100P is also available with 9-pin D-SUB, J1939 or M12 CAN connectors.
 U100-X3
Single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation
The Kvaser U100-X3 is a robust, galvanically-reinforced (Tested according EN 60335) single-channel CAN/CAN FD to USB interface with a 16-pin OBDII plug.
Signal and power isolated, the Kvaser U100 offers enhanced electrical protection, a vibration, shock and drop-proof housing and high-quality cabling that meets the needs of CAN system developers through to service technicians.
With an intelligent LED that displays bus loads and error frames, an industry-leading IP67 rating and an innovative connector system, the U100 has numerous stand-out features. Fully compatible with J1939, CANopen, NMEA 2000® and DeviceNet, this suits rugged and higher voltage applications in marine, industrial, construction, heavy-duty, agriculture and automotive, including electric vehicle markets.
The Kvaser U100 is also available with 9-pin D-SUB, J1939-13 Type II or M12 CAN connectors.
U100-X3
Single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation
The Kvaser U100-X3 is a robust, galvanically-reinforced (Tested according EN 60335) single-channel CAN/CAN FD to USB interface with a 16-pin OBDII plug.
Signal and power isolated, the Kvaser U100 offers enhanced electrical protection, a vibration, shock and drop-proof housing and high-quality cabling that meets the needs of CAN system developers through to service technicians.
With an intelligent LED that displays bus loads and error frames, an industry-leading IP67 rating and an innovative connector system, the U100 has numerous stand-out features. Fully compatible with J1939, CANopen, NMEA 2000® and DeviceNet, this suits rugged and higher voltage applications in marine, industrial, construction, heavy-duty, agriculture and automotive, including electric vehicle markets.
The Kvaser U100 is also available with 9-pin D-SUB, J1939-13 Type II or M12 CAN connectors.
 DIN Rail SE410S-X10
Ethernet to CAN/CAN FD interface for DIN Rail mounting
Kvaser DIN Rail SE410S-X10 is a powerful Ethernet to CAN/CAN FD interface with support for Kvaser t programs. It has 4 CAN/CAN FD channels, support for I/O via add-on modules and 16GB flash storage. Kvaser DIN Rail SE410S-X10 acts as a master for the add-ons. The housing has a smart mounting clip that attaches to a DIN rail for easy installation.
The communication between the I/O modules and the Kvaser DIN Rail SE410S-X10 uses an optical bus, thus there is no need for cables in between. The I/O modules can be controlled either from Kvaser’s CANlib SDK (over Ethernet) or directly on the unit using Kvaser t programs. The Kvaser DIN Rail SE410S-X10 is compatible with applications that use Kvaser’s CANlib SDK.
DIN Rail SE410S-X10
Ethernet to CAN/CAN FD interface for DIN Rail mounting
Kvaser DIN Rail SE410S-X10 is a powerful Ethernet to CAN/CAN FD interface with support for Kvaser t programs. It has 4 CAN/CAN FD channels, support for I/O via add-on modules and 16GB flash storage. Kvaser DIN Rail SE410S-X10 acts as a master for the add-ons. The housing has a smart mounting clip that attaches to a DIN rail for easy installation.
The communication between the I/O modules and the Kvaser DIN Rail SE410S-X10 uses an optical bus, thus there is no need for cables in between. The I/O modules can be controlled either from Kvaser’s CANlib SDK (over Ethernet) or directly on the unit using Kvaser t programs. The Kvaser DIN Rail SE410S-X10 is compatible with applications that use Kvaser’s CANlib SDK.
 U100
CAN/CAN-FD to USB Interface
The Kvaser U100 is a robust, single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation that squarely addresses the needs of the evolving automotive development market. Fully compatible with J1939, CANopen, NMEA 2000® and DeviceNet, this is the first in a new range of interfaces that is also suited to rugged applications in marine, industrial, heavy duty vehicle and heavy industries.
Key Features:
Supports CAN FD, up to 8 Mbit/s (with correct physical layer implementation)
Supports both 11-bit (CAN 2.0A) and 29-bit (CAN 2.0B active) identifiers
Powered through the USB connector
Supports bit rates from 10 Kbit/sec up to 1 Mbit/sec
Lightweight, glass fiber reinforced polyamide housing, overmolded with TPE
IP67 rated
DB-9 connector (other connectors available soon)
Intelligent LED UI
Reinforced galvanic isolation, design validated with 5000 VAC RMS applied for 60 seconds
Industrial grade temperature range, −40 °C to +85 °C
20,000 msg/s, each timestamped with a resolution of 100 µs
Support for SocketCAN
Compatible with J1939, CANopen, NMEA 2000® and DeviceNet
Fully compatible with applications written for other Kvaser CAN hardware with Kvaser CANlib
U100
CAN/CAN-FD to USB Interface
The Kvaser U100 is a robust, single-channel CAN/CAN FD to USB interface with reinforced galvanic isolation that squarely addresses the needs of the evolving automotive development market. Fully compatible with J1939, CANopen, NMEA 2000® and DeviceNet, this is the first in a new range of interfaces that is also suited to rugged applications in marine, industrial, heavy duty vehicle and heavy industries.
Key Features:
Supports CAN FD, up to 8 Mbit/s (with correct physical layer implementation)
Supports both 11-bit (CAN 2.0A) and 29-bit (CAN 2.0B active) identifiers
Powered through the USB connector
Supports bit rates from 10 Kbit/sec up to 1 Mbit/sec
Lightweight, glass fiber reinforced polyamide housing, overmolded with TPE
IP67 rated
DB-9 connector (other connectors available soon)
Intelligent LED UI
Reinforced galvanic isolation, design validated with 5000 VAC RMS applied for 60 seconds
Industrial grade temperature range, −40 °C to +85 °C
20,000 msg/s, each timestamped with a resolution of 100 µs
Support for SocketCAN
Compatible with J1939, CANopen, NMEA 2000® and DeviceNet
Fully compatible with applications written for other Kvaser CAN hardware with Kvaser CANlib
 Memorator Light HS v2
CAN-USB interface
Designed for troubleshooting any CAN-based (controller area network) system, the Kvaser Memorator Light HS v2 is an easy-to-use tool for logging serial data, with no software setup required. With an autobaud function that determines CAN bus bit rate, the Kvaser Memorator Light can be attached to any high-speed CAN bus without configuration. All CAN bus traffic is logged in a circular buffer, overwriting the oldest data when the buffer becomes full. A separate circular buffer keeps track of error frame conditions and the message traffic that occurs near the conditions.
Major Features
Single high-speed CAN channel (compliant with ISO 11898-2).
Supports both 11-bit (CAN 2.0A) and 29-bit (CAN 2.0B active) identifiers.
Supports bit rates from 50 Kbit/sec up to 1 Mbit/sec.
Autobaud function determines CAN bus bit rate.
Always in silent mode — log bus traffic without interfering.
Fixed 1GB internal storage.
Two FIFO buffers; one logs all messages on the bus, the other buffer logs approximately 1000 messages before and after an error frame.
Built-in real time clock (calendar) with battery backup.
LEDs alert the user to device status.
Note: The Kvaser Memorator Light HS v2 does not operate as an interface (i.e. provide real-time access to the CANbus). For a device that functions as both a standalone datalogger and CANbus interface, the Kvaser Memorator 2xHS v2, Kvaser Memorator Pro 2xHS v2, and Kvaser Memorator Pro 5xHS are recommended.
Software
Documentation, Kvaser CANlib SDK and drivers can be downloaded for free at www.kvaser.com/downloads.
Kvaser CANlib SDK is a free resource that includes everything you need to develop software for the Kvaser CAN interfaces. Includes full documentation and many program samples, written in C, C++, C#, Delphi, Visual Basic, Python and t programming language.
Kvaser CAN hardware is built around the same common software API. Applications developed using one device type will run without modification on other device types.
The Kvaser Memorator Config Tool provides easy access to the recorded data when connected to the device via a USB port. The tool supports multiple formats used by popular analysis software. In addition, the extraction software allows the user to clear and reinitialize the device’s memory.
Memorator Light HS v2
CAN-USB interface
Designed for troubleshooting any CAN-based (controller area network) system, the Kvaser Memorator Light HS v2 is an easy-to-use tool for logging serial data, with no software setup required. With an autobaud function that determines CAN bus bit rate, the Kvaser Memorator Light can be attached to any high-speed CAN bus without configuration. All CAN bus traffic is logged in a circular buffer, overwriting the oldest data when the buffer becomes full. A separate circular buffer keeps track of error frame conditions and the message traffic that occurs near the conditions.
Major Features
Single high-speed CAN channel (compliant with ISO 11898-2).
Supports both 11-bit (CAN 2.0A) and 29-bit (CAN 2.0B active) identifiers.
Supports bit rates from 50 Kbit/sec up to 1 Mbit/sec.
Autobaud function determines CAN bus bit rate.
Always in silent mode — log bus traffic without interfering.
Fixed 1GB internal storage.
Two FIFO buffers; one logs all messages on the bus, the other buffer logs approximately 1000 messages before and after an error frame.
Built-in real time clock (calendar) with battery backup.
LEDs alert the user to device status.
Note: The Kvaser Memorator Light HS v2 does not operate as an interface (i.e. provide real-time access to the CANbus). For a device that functions as both a standalone datalogger and CANbus interface, the Kvaser Memorator 2xHS v2, Kvaser Memorator Pro 2xHS v2, and Kvaser Memorator Pro 5xHS are recommended.
Software
Documentation, Kvaser CANlib SDK and drivers can be downloaded for free at www.kvaser.com/downloads.
Kvaser CANlib SDK is a free resource that includes everything you need to develop software for the Kvaser CAN interfaces. Includes full documentation and many program samples, written in C, C++, C#, Delphi, Visual Basic, Python and t programming language.
Kvaser CAN hardware is built around the same common software API. Applications developed using one device type will run without modification on other device types.
The Kvaser Memorator Config Tool provides easy access to the recorded data when connected to the device via a USB port. The tool supports multiple formats used by popular analysis software. In addition, the extraction software allows the user to clear and reinitialize the device’s memory.
 Hybrid Pro 2xCAN/LIN
Dual channel USB-CAN/LIN interface with CAN FD support
Kvaser Hybrid Pro 2xCAN/LIN is a flexible, dual channel interface that allows each channel to be assigned independently as CAN, CAN FD or LIN. This makes the Kvaser Hybrid Pro 2xCAN/LIN a must-have ’universal interface’ for every engineer involved in automotive communications!
The Kvaser Hybrid Pro 2xCAN/LIN offers advanced features such as support for CAN FD, Silent Mode, Single Shot, Error Frame Generation and Kvaser MagiSync automatic clock synchronization. As a Pro-level device, this interface can host user-developed programs, created using resources provided within Kvaser’s free CANlib SDK. These can be designed to accomplish a range of advanced tasks, such as CAN node simulation and CAN flashing, or create a LIN to CAN gateway. Guidance and code examples are provided.
Main Features:
Hybrid USB CAN/LIN two channel interface with two separate 9-pin D-SUBs
t programs allow users to customise the Hybrid Pro 2xCAN/LIN’s behaviour
Supports High Speed CAN (ISO 11898-2) up to 1Mbit/s and LIN 2.2A (ISO 17987 Part 1-7) up to 20 kbit/s
Supports CAN FD (ISO 11898-1) up to 5 Mbit/s (with correct physical layer implementation)
Capable of sending up to 20000 messages per second, per CAN channel, time-stamped with a 1 microsecond accuracy
USB powered (bus V+ reference required for LIN)
Kvaser MagiSync — automatic time synchronization between MagiSync-enabled Kvaser interfaces connected to the same PC
Single shot function ensures that failed CAN transmissions will not retry
CAN Error Frame Generation and Error Counters
LED lights indicate device status
Fully compatible with J1939, CANopen, NMEA 2000 and DeviceNet
Supplied with Kvaser CANlib and Kvaser LINlib, free software APIs that are common to all Kvaser hardware and enable the channels to be configured intuitively and fast
Extended operating temperature range from −40 to 85 °C
Support for SocketCAN, see elinux.org for details
Software
Documentation, Kvaser CANlib SDK and drivers can be downloaded for free at www.kvaser.com/downloads
Kvaser CANlib SDK is a free resource that includes everything you need to develop software for the Kvaser CAN and LIN interfaces. Includes full documentation and many program samples, written in C, C++, C#, Delphi, Visual Basic, Python, as well as Kvaser’s t Programming language
All Kvaser CAN interface boards share the common software API, CANlib SDK. Programs written for one interface type will run without modifications on the other interface types
J2534 Application Programming Interface available
RP1210A Application Programming Interface available
HTML-Help and online documentation in Windows and Linux
Hybrid Pro 2xCAN/LIN
Dual channel USB-CAN/LIN interface with CAN FD support
Kvaser Hybrid Pro 2xCAN/LIN is a flexible, dual channel interface that allows each channel to be assigned independently as CAN, CAN FD or LIN. This makes the Kvaser Hybrid Pro 2xCAN/LIN a must-have ’universal interface’ for every engineer involved in automotive communications!
The Kvaser Hybrid Pro 2xCAN/LIN offers advanced features such as support for CAN FD, Silent Mode, Single Shot, Error Frame Generation and Kvaser MagiSync automatic clock synchronization. As a Pro-level device, this interface can host user-developed programs, created using resources provided within Kvaser’s free CANlib SDK. These can be designed to accomplish a range of advanced tasks, such as CAN node simulation and CAN flashing, or create a LIN to CAN gateway. Guidance and code examples are provided.
Main Features:
Hybrid USB CAN/LIN two channel interface with two separate 9-pin D-SUBs
t programs allow users to customise the Hybrid Pro 2xCAN/LIN’s behaviour
Supports High Speed CAN (ISO 11898-2) up to 1Mbit/s and LIN 2.2A (ISO 17987 Part 1-7) up to 20 kbit/s
Supports CAN FD (ISO 11898-1) up to 5 Mbit/s (with correct physical layer implementation)
Capable of sending up to 20000 messages per second, per CAN channel, time-stamped with a 1 microsecond accuracy
USB powered (bus V+ reference required for LIN)
Kvaser MagiSync — automatic time synchronization between MagiSync-enabled Kvaser interfaces connected to the same PC
Single shot function ensures that failed CAN transmissions will not retry
CAN Error Frame Generation and Error Counters
LED lights indicate device status
Fully compatible with J1939, CANopen, NMEA 2000 and DeviceNet
Supplied with Kvaser CANlib and Kvaser LINlib, free software APIs that are common to all Kvaser hardware and enable the channels to be configured intuitively and fast
Extended operating temperature range from −40 to 85 °C
Support for SocketCAN, see elinux.org for details
Software
Documentation, Kvaser CANlib SDK and drivers can be downloaded for free at www.kvaser.com/downloads
Kvaser CANlib SDK is a free resource that includes everything you need to develop software for the Kvaser CAN and LIN interfaces. Includes full documentation and many program samples, written in C, C++, C#, Delphi, Visual Basic, Python, as well as Kvaser’s t Programming language
All Kvaser CAN interface boards share the common software API, CANlib SDK. Programs written for one interface type will run without modifications on the other interface types
J2534 Application Programming Interface available
RP1210A Application Programming Interface available
HTML-Help and online documentation in Windows and Linux
